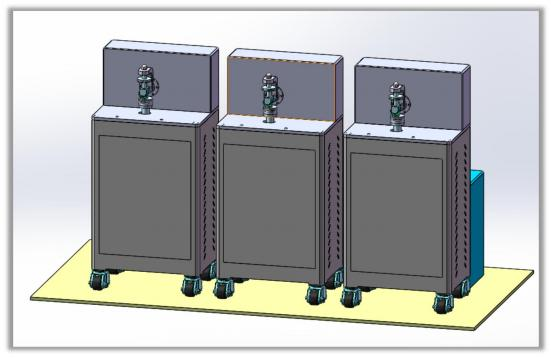
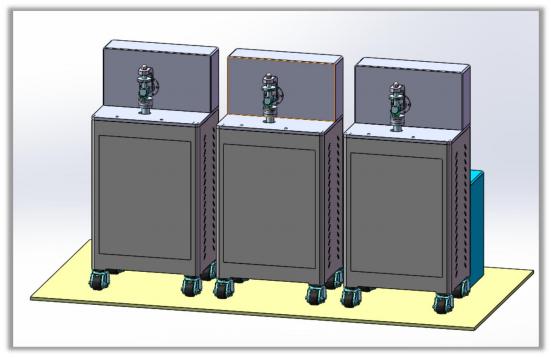
HH3 belauneko artikulazioen higadura probatzaileak hiru zati ditu: proba ostalaria, instalazioa eta kontrol elektronikoko zatia. Belauneko inplanteak eta beste kalte prozesu batzuen higadura, nekea eta zuriketa simula ditzake, eta 3 belauneko giltzadura probatu ditzake aldi berean Inplanteak.

1 .1 Ezaugarriak
HH3 belauneko artikulazioen higadura-probagailuak hiru zati ditu: proba-ostalaria, instalazioa eta kontrol elektronikoko zatia. Belauneko inplanteak eta beste kalte prozesu batzuen higadura, nekea eta zuriketa simula ditzake, eta 3 belauneko giltzadura probatu ditzake aldi berean Inplanteak. Proba-makina honek automatikoki kontrolatzen ditu proba-indarra, proba-denbora eta abiadura, eta proba-indarra eta momentua denbora errealean neurtzen ditu. Belauneko artikulazio-protesien fabrikazio, erabilera eta ikerketarako aplikagarria da eta erlazionatutako beste mediku-eremu batzuetan.
Ardatz-unitateak inportatutako AC serbo motor eta kontrol-sistema hartzen ditu, abiadura-erregulazio etengabeko erregulazioa eta beharrezkoa dena. Kalkulatu momentu konstantea / indar axial konstantea abiadura-barrutian; proba-indarra torloju-malgukien karga-sistema baten bidez aplikatzen da. Proba-indarra etengabe eta fidagarritasunez aplikatzen da, eta proba-indarra operadoreak ordenagailuaren interfazean ezar dezake; ardatzaren abiadura, bira-kopurua, proba-indarra eta proba-denbora bezalako parametroak ordenagailu batek kontrolatzen ditu, eta proba-datuak denbora errealean bildu eta marraztu ditzake. Dagokion proba-kurba egin daiteke, eta proba-datuak edo kurba nahierara gorde, berreskuratu eta inprimatu daitezke.
Hiru noranzkoko serbo-motoreak gidatutako karga-sistema osagai desberdinekin, artikulazio osoa AP, biraketa, flexioa Abdukzioa eta beste mugimendu batzuetarako, lau osagaiko indar-sentsore moduluak pare-indarra, bultzada horizontala eta flexioa probatzen ditu, hurrenez hurren. , doitasun handiko kodetzaile birakariarekin, denbora errealeko angeluen neurketarekin eta desplazamenduarekin hornitutako hiru noranzko serbo multzoa eta datu-iturri eraginkorra eskaintzen du. ostalari ordenagailuaren kontrolerako.
Mugimendu-mekanismo bakoitza modu independentean kontrolatuta eta koordinatuta dago, hiru estazio eta 15 ardatz ditu, juntagailuen osagaien kalteen proba osatzeko.
1.2 Zehaztapen nagusiak
1. Tresnen funtzionamendu-softwarea txinatar eragiketa-interfazearekin.
2. Tresna exekutatzen ari den softwarea erabiltzeko prest dago, ez da software berezirik behar.
3. Askatasun-mailak: proba-estazio bakoitzak flexioa / luzapena, barne-errotazioa / kanpoko errotazioa, aurrera / atzera mugimendua, hiru dimentsioko mugimendu-kontrola eta indar axiala kargatu ditzake, eta askatasun-maila bakoitza izan daiteke. kontrolatua. Sentsore zein indarra detektatzen dira; Mugimendu librea barne/kanpo norabidean eta barne/kanpo norabidean posible da.
4. Sentsorearen ez-linealtasuna ez da eskala osoaren % 0,10 baino handiagoa, eta histeresia ez da % 0, 10 baino handiagoa, errepikakortasuna ez da eskala osoaren % 0,05 baino handiagoa.
5. Desplazamendu- eta desplazamendu-sentsoreen tartea: desplazamendu axiala 100 mm, flexio/luzapena 120, barne-errotazioa/Kanpo-errotazioa 20, aurreko/atzealdeko desplazamendua 15 mm, erdiko/alboko desplazamendua 5 mm, alderantzizko/balguak.
6. Karga-ahalmena eta indar-sentsorearen barrutia: karga axiala 3KN, barne/kanpo momentua 20Nm, Aurrera/atzera karga 1KN.
7. Indarraren eta desplazamenduaren kontrolaren zehaztasuna: Ziklo bateko indarraren eta desplazamenduaren anplitudearen erroreak ez du zehaztutako gehienezkoa gaindituko. Fase-errore maximoa ez da ziklo osoaren % 3 baino handiagoa izango. Tresna ISO 14243-1 eta ISO 14243-3 arauen arabera probatzen da, kontrola daitekeen askatasun maila bakoitzean. Indar eta desplazamendu sentsoreen kurbak eta desbideratze balio neurtuak .
8. Zortzi kanaleko sarrera analogikoko funtzioa du eta kanpoko datuekin sinkroniza daiteke.
9. Proba maiztasuna: 1 Hz, zehaztasuna 0,1 Hz.
10. Kontrol-sistema: estazio anitzeko eta kanal anitzeko serbo-kontrolagailu bereizi batekin hornitu behar da indarraren eta desplazamenduaren begizta itxiko kontrol automatikoa lortzeko.
11. Kontrolagailuak gai izan behar du gailurtik haraneko balio-kontrolaren konpentsazioa egiteko, seinaleak eskatzen duen gailurra zehaztasunez iritsi daitekeela ziurtatzeko uhin forma zikliko bat kontrol-instrukzio gisa erabiltzen denean.
12. Ibilbide-kurba pertsonalizatuen programazio-probak ezartzeko gai izan behar du; kontrola daitekeen askatasun-maila bakoitzaren eskuzko kontrola urratsez urrats egiteko gai izatea; eta datu gordinak Excel formatuan esportatzeko gai izan.
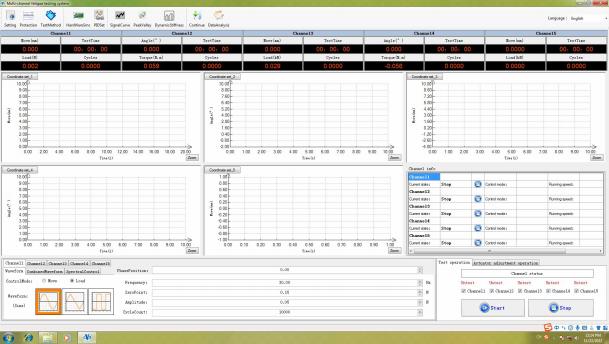
13. Proba egiten den bitartean, softwareak geltoki bakoitzaren indar- eta desplazamendu-kurbak denbora errealean eta kontrol-sistema islatu ahal izan behar ditu. Sistemak automatikoki doitzeko gai izan behar du laginaren mugimendu-kurba helburu-kurbarekin bat etor dadin, eskuz esku hartu gabe.
14. Begizta itxiko denbora errealeko kontrol-tasa ≤ 6kHz , indarraren eta desplazamenduaren kontrol-modua izan ezik, kontrolagailuak kalkulatutako aldagaien kontrol-modua ezartzeko gai izan behar du.
15. Laginketa digitalaren maiztasuna ez da 100 kHz baino txikiagoa izan behar, eta laginketa-metodoak honako hauek izan behar ditu: gailurra, haranaren balioa, denbora-denbora, maximoa, minimoa, batez bestekoa, zikloa/logaritmoa, etab.
16. Modu bikoitza du, kanalaren feedback muga kanalaren komandoaren funtzionamendu modua.
17. Falta den sentsorearen kitzikapena autokontrolatzeko funtzioa du.
18. Tenperatura: lubrifikatzailearen tenperatura (37 ℃) mantendu daiteke eta tenperatura kontrolatzeko sistema bat dago.
19. Lubrifikatzailea: junturaren gainazala lubrifikatzailean murgil daiteke, eta lubrifikatzailea isuririk gabe zigilatu behar da; eta ihesak kontrolatzeko gailu batekin hornituta.
20. Proba-osagaiak: probak egiteko, lan-postuak kargatzeko eta mugimendu guztietarako kargatzeko beharrezko tresneriaz hornituta Murgiltze-lanpostuak erreferentziako lagin estandarrak eskaintzen ditu ekipoak kalibratzeko eta arazoak konpontzeko.
21. Larrialdietarako gelditzeko botoia: ekipoak larrialdietarako gelditzeko botoia izan behar du.
22. Segurtasun-babesa: ekipoak polikarbonatozko material termoplastikozko estalki babesgarri argi eta garden batekin hornitu behar du; Segurtasun-blokeatzeko gailu bat dago. Babes-estalkia irekitzen denean, ekipoak probak automatikoki gelditzeko gai izan behar du.
1.3 Lan baldintzak
Giro-tenperaturan 10 ℃ ~ 35 ℃ arteko tartean;
Hezetasun erlatiboa ez da %80 baino gehiago;
Instalazio egokia oinarri sendo baten gainean;
Bibraziorik, euskarri korrosiborik eta eremu elektromagnetikoko interferentzia handirik gabeko ingurune garbi batean;
Elikatze-iturriaren tentsioaren gorabeherak ez luke tentsio nominala gainditu behar  % 10 .
% 10 .
2. Egitura-konposizioa
Proba-makina hiru lan-estaziotan banatzen da, hau da, ardatzaren gidaritza-sistema, laginak kargatzeko sistema eta indar axiala Hiru lan-estazioek ardatzaren unitate bera partekatzen dute. Sistema dinamikoa eta softwarea kontrolatzeko sistema.
2.1 Ardatz gidatzeko sistema
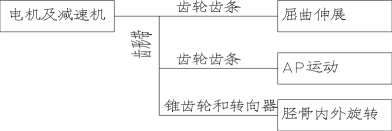
Ardatz-motorrak Panasonic AC serbo sistema integratua eta motorra erabiltzen ditu. Motor-potentzia maximoa 7,5 Kw-koa da, bere potentzia 3 irteera-lerrotan banatzen da.
Lehenengoa: engranaje kremailera, enbrage elektromagnetikoa eta momentu-sentsorearen ondoren, femurraren pendulu birakaria bihurtzen da Enbrage elektromagnetikoa piztea eta itzaltzea kontrolatzeaz arduratzen da eta momentu-sentsoreak momentua neurtuz. Neurtu momentua funtzionatzerakoan.
Bigarrena: horzdun gerrikotik eta engranaje-kremaileratik igaro ondoren, ezkerreko eta eskuineko aldakor translazio bihurtzen da, laginaren AP mugimendua bultzatuz.
Hirugarrena: horzdun gerrikoaren, engranaje alakaren eta gidatzeko engranajearen bidez, tibiaren biraketa-swing bihurtzen da, lagina barrurantz eta kanporantz biratzeko.
Transmisio-bidea beheko irudian ageri da.
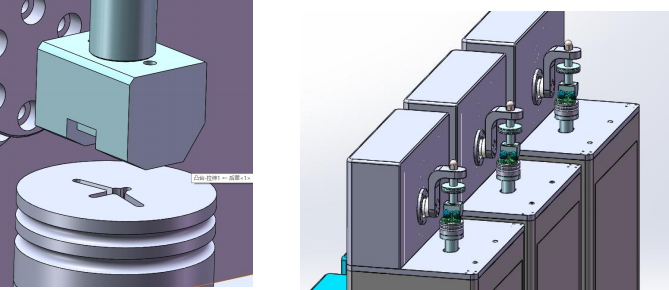
2.2 Laginak kargatzeko sistema
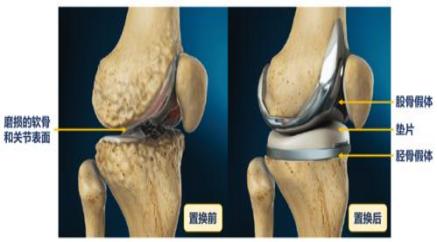
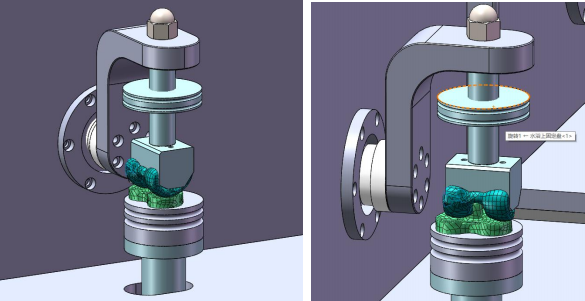
Laginak kargatzeko sistemak giza baldintzetan mugimendu askatasuna simulatzen du belauneko artikulazioko osagaien inplanteetarako. Instalatu eta finkatuta dago. Muntatzeko eserlekuak, irristagarrizko eserlekuak, nylonezko eserlekuak, arrabol batek, irristagarrizko mahuka batek eta abar ditu.
Inplementazio zehatza hau da:
Belaunen artikulazioen higadura-tresneria instalatzea nahiko zaila da. Mesedez, instalatu zorrozki diagramaren arabera. Horrez gain, dagozkion bideak erantsita daude.
Erabili dagokion hari-zenbakia hariak konektatzean.
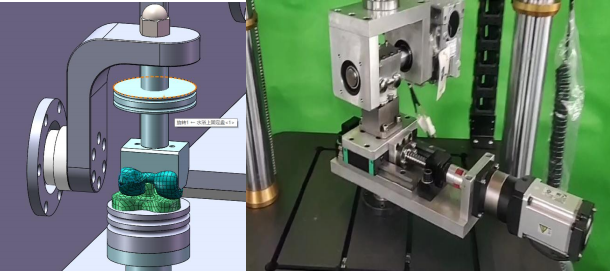
(Irudian agertzen den egitura mugimenduaren printzipioa erakusteko bakarrik erabiltzen da, benetako objektua nagusituko da)
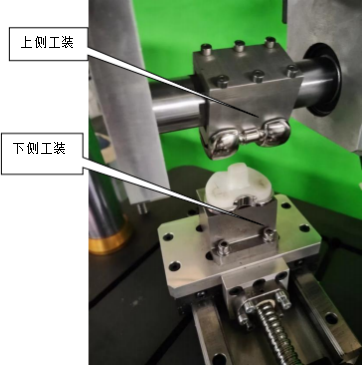

( Irudian agertzen den egitura mugimenduaren printzipioa erakusteko bakarrik erabiltzen da, benetako objektua nagusituko da)
Goiko eta beheko tresneria laginaren arabera berriro prozesatu behar duzu proba-baldintzak betetzeko. (Produktu bakoitzaren tamaina Xehetasunak aldatzen dira)

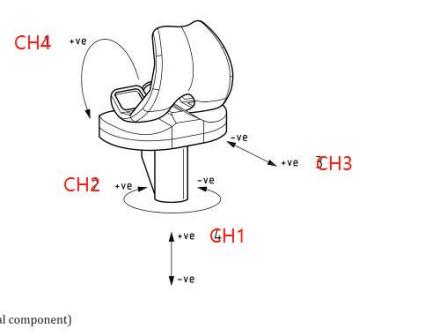
6. Kanalaren hautaketa eta erlazionatutako doikuntzak
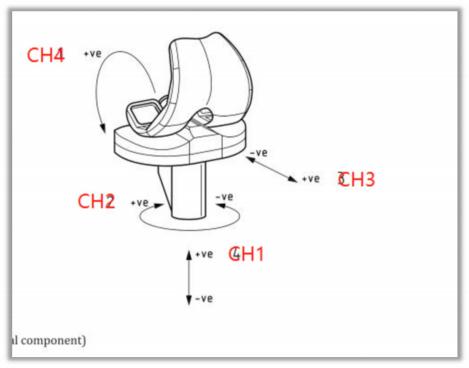
Goiko argazkiarekin konbinatuta, egiaztatu zein kanal funtzionatzen duen kanala egiaztatuz. ISO 14243.3 exekutatzen duzunean, hautatu 1-4 korridore, Channel 5 hedapen-kanal bat da ondorengo eguneratzeetarako. Ardatz bakarreko edo ardatz bikoitzeko beste esperimentu batzuetarako, hautatu dagokion kanala.
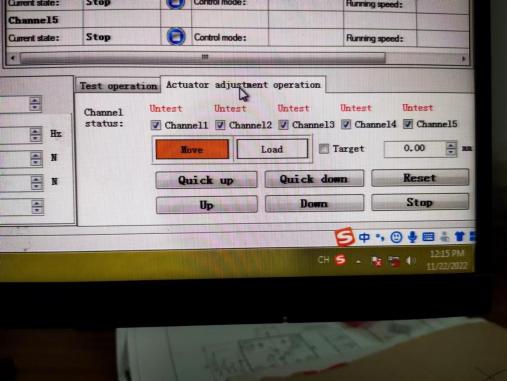
Azkar gora/gora = karga/karga azkarra
Azkar behera/behera = Azkar behera/behera
7. ISO 14243.3ri dagokiona, beharrezkoa da kontrol-uhin-forma inportatzea, irudian ikusten den moduan:
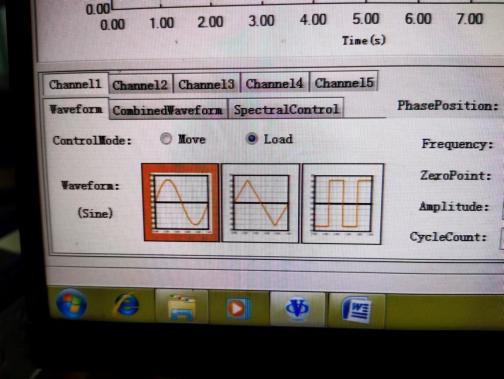
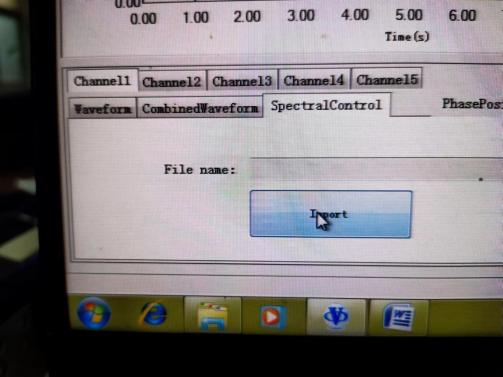
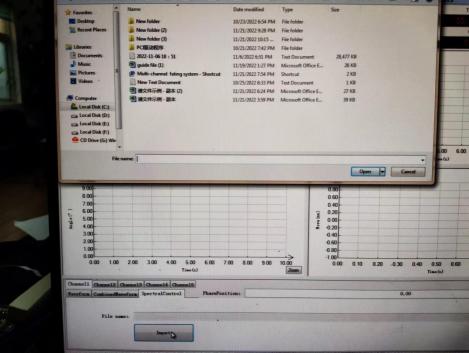
Hautatu fabrikako aurrez ezarritako uhin forma. Uhin-forma edo ekintza berri bat ezarri behar baduzu, fitxategi honetan egin dezakezu. Aldatu eta gorde beste izen batekin.
Kanal bakoitzaren doikuntza zehatzak ikusteko, ikusi kanal bakarreko softwarearen eskuliburua.
8. Babesari buruz:
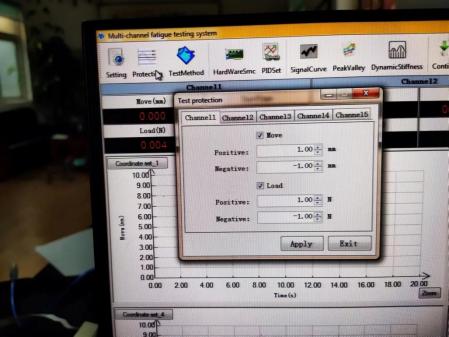
esperimentua ez da mugitzen edo ezin da exekutatu Hasi sakatu ondoren, egiaztatu babes-aukeretan tolerantziaz kanpoko parametrorik dagoen.
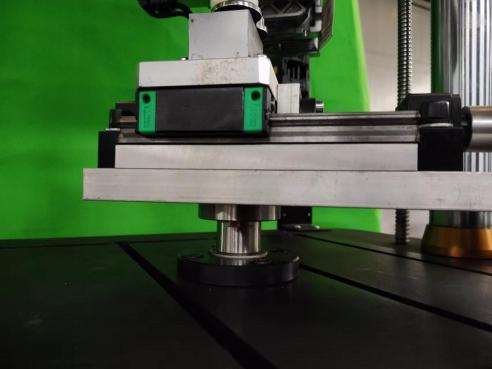
2.3 Indar axiala kargatzeko sistema
Makina honek malgukia kargatzeko egitura hartzen du. Kargatze-mekanismoa urratseko motor batek gidatzen du, arku zirkularreko uhal horzdun baten bidez transmititzen dena, polea sinkrono baten eta doitasuneko bola-torloju-pare baten bidez, eta doitasuneko mugimendu linealaren gida errail batek gidatzen du indarra aplikatzeko eserlekua gidatzeko. Indarra aplikatzeko eserlekua malguki kargatutako mekanismo batekin finkatzen da, plataforma irristakorrari indarra aplikatzen dion malgukia konprimitu ondoren. Arrabolaren proben marruskadura gainazalen arteko proba-indarra sortzen da. Motora kontrolatuz indar-eserlekua espazioan aurrera eta atzera egiteko mugitzeko, Hau da, proba-indarraren aplikazioa eta magnitudea kontrolatu daitezke. Karga-sentsore bat instalatzen da indarra aplikatzeko eserlekuaren planoan. Bildu indar-seinaleak. Mugimendu linealeko errodamenduen gidak proba-indarraren aplikazioa eta egonkortasuna bermatzen ditu. Udaberria kargatzeko pieza Erraz kargatu eta deskargatu.
Proba-indarra kargatzen hasten denean, sentsoreak aurrez ezarritako presioa sartuko du mikroordenagailuaren kontrol-sisteman eta aurrez ezarritako presioa. Gero, mikroordenagailuak motorra kontrolatzen du atzera egiteko sistemaren presioa aurrez ezarritako presioarekin orekatu arte.
2.4 Karga bustitzeko sistema
murgiltze likido-kutxa batena, berogailua, tenperatura sentsore batena, ponpa peristaltikoa, silikonazko hodi batena, etab.
Bezeroek amaierako gainazaleko kokapen-zuloak prozesatu ditzakete laginaren benetako tamainaren arabera, eta estutzeko angelua erregulagarria da. Angelua egokitu ondoren, blokeatu ezkerreko kokapen graduatzailea .
2.5 Softwarea kontrolatzeko sistema Kontrol-sistema kontrol-makinan instalatuta dago eta proba-ostalarira konektatzen da komunikazio-kable baten bidez. Softwarearen ingurune eragilea WINDOWS XP da. Kontrol-softwarea eragiketa-interfaze grafiko interaktiboa da, sistema abiarazte eta geldiarazteko argibideak bidaltzeaz arduratzen dena, funtzionamendu-abiadura, karga-indarra, murgiltze likidoaren tenperatura eta sistemaren funtzionamendu-datuak biltzeaz, hala nola indar axiala, momentua, tenperatura, proba-denbora. , etab. proban zehar. Kalkulatu eta prozesatu ondoren, probaren indar-denbora, momentu-denbora eta beste datu-kurbak grafiko moduan ateratzen dira. Goiko argazkiarekin konbinatuta, egiaztatu kanala zein kanal funtzionatzen duen baieztatzeko. ISO 14243.3 exekutatzen ari zarenean, hautatu 1-4 kanal, 5 t kanala hedapen-kanal bat da ondorengo bertsio berritzeko. Ardatz bakarreko edo ardatz bikoitzeko beste esperimentu batzuetarako, hautatu dagokion kanala. Bizkor igo/igo = azkar kargatu/kargatu Azkar behera/behera = azkar desinstalatu/desinstalatu 7. ISO 14243.3ri dagokiona, beharrezkoa da kontrol-uhin-forma inportatzea, irudian ikusten den moduan: Hautatu fabrikan aurrez egindako uhin forma. Uhin forma edo ekintza berri bat ezarri behar baduzu, fitxategi honetan alda dezakezu. Gorde beste izen batekin. Kanal bakoitzaren doikuntza zehatzak lortzeko, ikusi kanal bakarreko softwarearen eskuliburua. 8. Babesari buruz: esperimentua ez da mugitzen edo ezin da exekutatu Hasi sakatu ondoren, egiaztatu babes-aukeretan tolerantziaz kanpoko parametrorik dagoen. 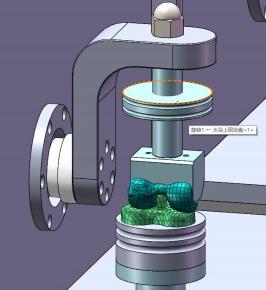
 {4909702}
{4909702}

 {4909680}
{4909680}
 Kanal bikoitzeko eta balantze-barrako nekea probatzeko makina
Kanal bikoitzeko eta balantze-barrako nekea probatzeko makina
 Hortz-materialaren arteko marruskadura probatzeko makinak
Hortz-materialaren arteko marruskadura probatzeko makinak
 Tolestura birakaria nekea probatzeko makina
Tolestura birakaria nekea probatzeko makina
 Hezur-plakaren tolesturako nekea probatzeko makina
Hezur-plakaren tolesturako nekea probatzeko makina
 Intramedulary iltze zizaila probatzeko makina
Intramedulary iltze zizaila probatzeko makina
 Bizkarrezurreko Barne Finkatze Sistema Konpresioa eta Torsioa Nekea Probatzeko Makina
Bizkarrezurreko Barne Finkatze Sistema Konpresioa eta Torsioa Nekea Probatzeko Makina